
The PPS mobile traverse system
Mobile Traverse System – engineered by Poltinger Precision Systems (PPS)

The PPS mobile traverse system
From time to time we get some really interesting and challenging customer requests. This is the story of one of them.
The requirement of a customer inspired PPS to re-develop a solution of an existing idea and to turn it into an automatically self-measuring, mobile traverse system.
Due to the special machine design, a standard TBM guidance system and its requirement for an optical line of sight (laser window) could not fulfill the demands for this tunnel boring application. The basic setup of two targets installed on the TBM being measured by one Totalstation installed on the tunnel wall was not sufficient. The measurement distances in tight curves would be way too short to allow proper navigation information to be measured and calculated.
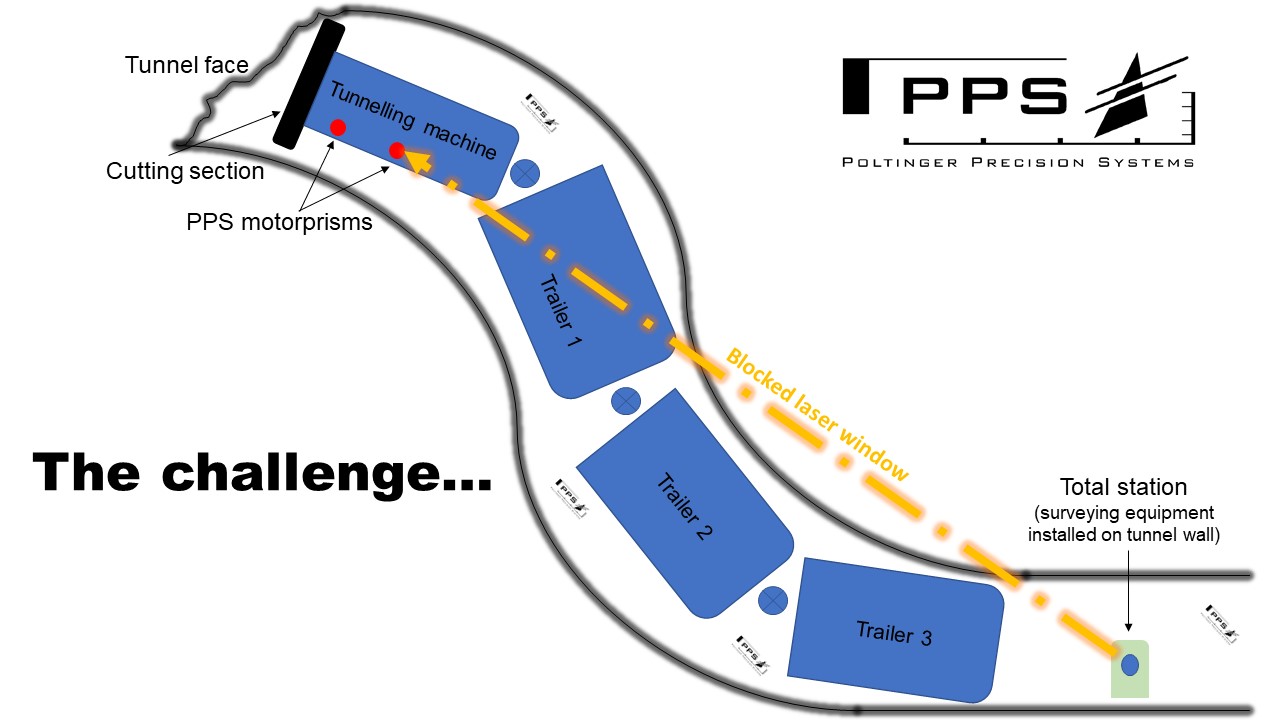
The challenging task
Therefore the existing PPS idea of move-along systems for pipe-jacking navigation was redesigned and customised to fit the needs of this special machine.
The PPS Mobile Traverse System was developed to be a highly flexible guidance system for a tunneling machine, capable of driving extremely tight curves with radii smaller than 50 meter.
The result was a navigation solution utilizing five Total stations, two PPS motorprisms and the necessary hardware to communicate all the results to a centralised Industrial-PC, running a specifically redesigned software and operator display.
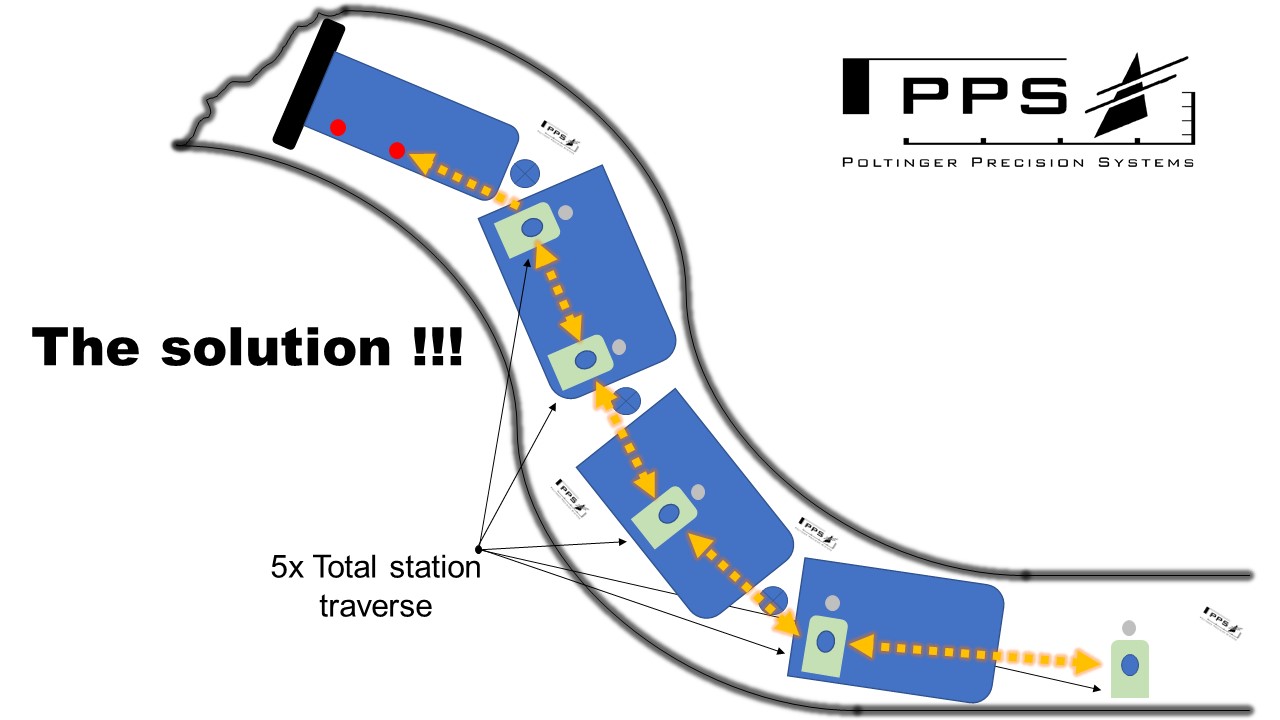
Solution: The PPS mobile traverse system
The basic idea is to transfer the geodetic information along this traverse to its main target, the motorprisms at the front of the machine.
Four Totalstations installed on the three machine trailers, one on the tunnel wall.
Split into global and local measurement procedures, the global measurement delivers the coordinates throughout the 5 Totalstation traverse. The local measurement uses the coordinates of the last Totalstation mounted at the front of the machine to measure the two PPS motorprisms in turns. Combining the two prism local measurement with an inclination sensor and the global coordinates (of the mobile traverse calculation) , the machine cutterhead position can be determined in 3D with a very high accuracy.
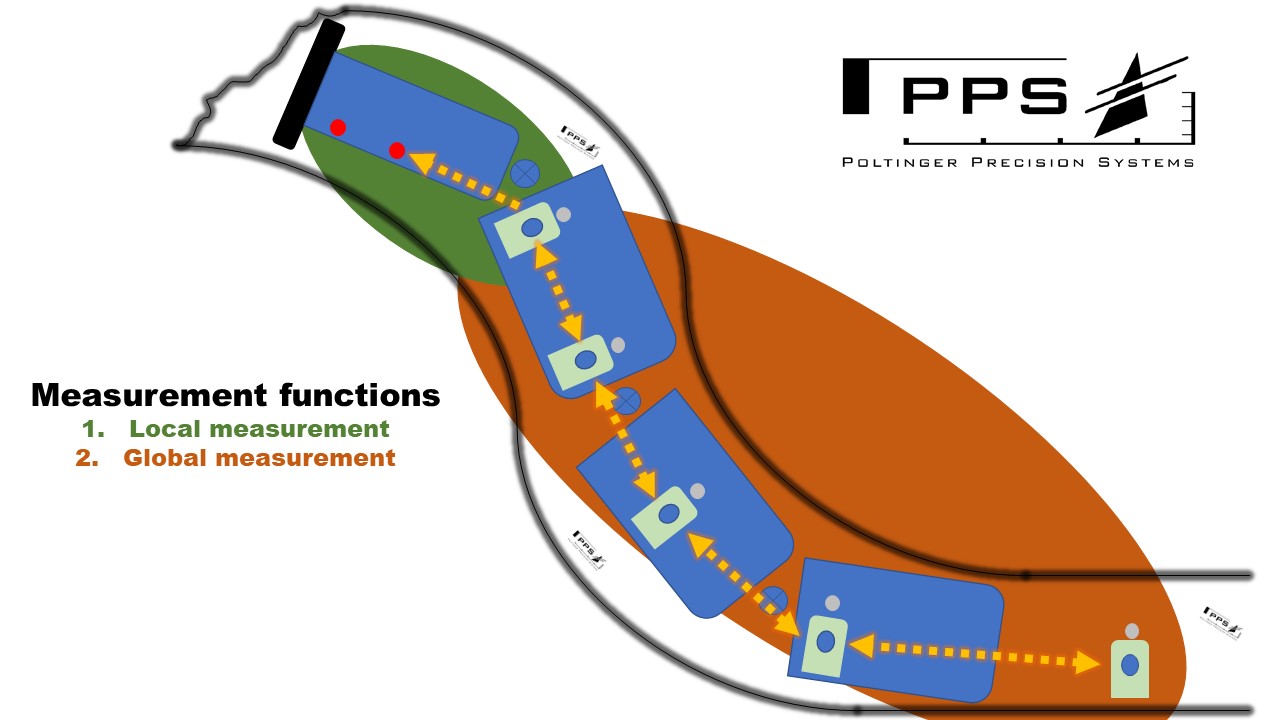
Local and global measurement procedure
Besides showing the machine operator the necessary navigation information, a lot of parameters and results need to be communicated to the machine logic controllers to get the mining workflow going.
The software steers all surveying instruments to measure not only the Totalstation in front, but also the one installed backwards on the machine, thus creating a mobile traverse with fully automatic position determination.

Total station TS #3 on trailer

Total station TS #2 on trailer

Total station installed on tunnel wall
Two PPS motorprisms at cutterhead section
This solution was integrated into the whole machine workflow, interacting with the machine processes.
Therefore a high level of integration within the machine logics and the PLC was necessary.
Careful customization of all requirements on machine and navigation side had to be considered, implemented and tested during the ramp-up-phase of the machine.
Finally all processes were balanced and working seamlessly together.
Of course this logic is very flexible in terms of scalability. It could be used for longer curved pipe-jacking projects reducing the neccessity of ongoing control survey works. Furthermore it could be used for high-end TBM applications with multiple shields and the requirement of high-precision positioning of all the moving parts relatively to each other.
Basically this solution of a freely moving and self-determining positioning system can be used for any kind of subsurface application.
If you wish to get more information or want to know how this solution can be adapted and customised to suit your needs, get in touch with PPS-Guidance Headquarter here.


